La locomotion d'un robot

Comme son nom le suppose, un robot mobile doit être en capacité de se déplacer dans son environnement. Pour cela, il doit être équipé de solutions techniques lui permettant de se mouvoir dans l'espace. Et il existe différents moyens pour y parvenir. Elles s'inspirent du vivant mais aussi de la technologie de tous les jours. Voyons cela de plus prêt.
Locomotion de type véhicule ou à roues différentielles
Dans ce type de locomotion, le robot est équipé généralement de deux roues motrices séparées placées de part et d'autre du robot, ainsi que d'une ou plusieurs roues libres. En faisant varier la vitesse de rotation des moteurs pilotant les roues motrices, le robot peut changer de direction. Les roues libres, quant à elles, évitent au robot de basculer. Ce qui les fait ressembler davantage à des véhicules autonomes qu'à des robots que l'on peut voir dans les films de science-fiction.
Parmi les robots à roues différentielles, nous pouvons citer le robot Khepera, développé, au milieu des années 1990, à l'Ecole Polytechnique Fédérale de Lausanne (EPFL), en Suisse. Mais également, les rovers Spirit et Opportunity, développés par la NASA et qui ont exploré la planète Mars.

La première version du robot Khepera en 1996 (source : EPFL)

Spirit et Opportunity, les rovers jumeaux ayant exploré la planète Mars (source : NASA)
Locomotion à pattes
Ce type de locomotion va s'inspirer du vivant, et notamment du règne animal. On pourra distinguer :
- les robots octopodes : comme les araignées, ils sont équipés de 8 pattes pour se déplacer.
- les robots hexapodes : sont constitués de 6 pattes, tels des insectes.
- les robots quadipèdes : sont constitués de 4 pattes, comme de nombreux mammifères terrestres (chiens, chats, chevaux).
- les robots bipèdes : sont équipés de 2 jambes et imitent notre manière de nous déplacer.
Quelques exemples de robots à pattes :
- SPOT, le robot chien de la société américaine Boston Dynamics
- NAO, le robot humanoïde de la société Aldebaran Robotics

Spot, le chien robot de Boston Dynamics (source : Boston Dynamics)
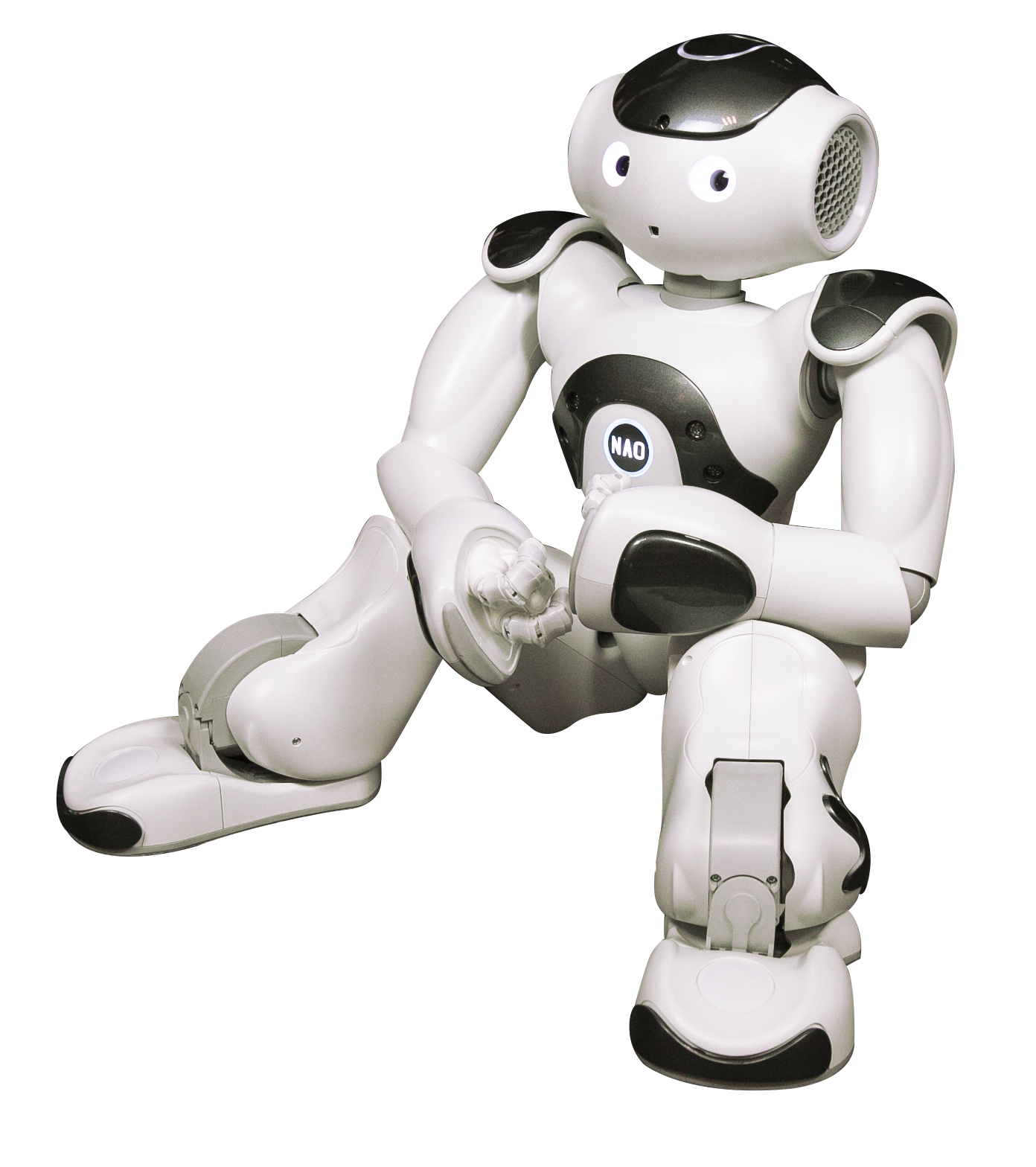
NAO de Aldebaran Robotics (source : Aldebaran Robotics)
La reptation
Ici, pas de surprise. Point de roues, ni de pattes, mais des robots ressemblant à des serpents, rampant sur le sol. Un exemple nous vient là encore de la NASA (tout comme les rovers ayant exploré Mars), avec "EELS" (Exobiology Extant Life Surveyor), toujours en développement, et qui pourrait être amené à explorer la Lune, notre bonne vieille planète Terre, mais également des Lunes de glace comme Encelade (satellite naturel de Saurne).

EELS, le robot serpent ayant pour objectif d'explorer des lunes de glaces par exemple (source : NASA)
Je ne me suis pas encore penché sur les mécanismes utilisés pour ce tye de locomotion. Mais pourquoi pas dans un avenir plus ou moins proche.
La locomotion aérienne
La recherche en robotique ne s'arrête pas au niveau du sol, et continue son biomimétisme, en s'inspirant aussi des oiseaux ou encore des insectes.
Ainsi la société Festo, spécialisée dans l'automatisation et la formation technique professionnelle, a développé SmartBird, un robot inspiré du goëland argenté, capable de décoller, voler et atterrir seul.

SmartBird, le robot s'inspirant du goëland argenté (source : Festo)
En 2017, le CNRS publiait sur son site l'interview de Juan Cortés, directeur de recherche au LAAS (Laboratoire d'Analyse et d'Architecture des Systèmes) concernant la robotique aérienne. Le projet développé par le LAAS consiste en un drone équipé d'un bras léger.
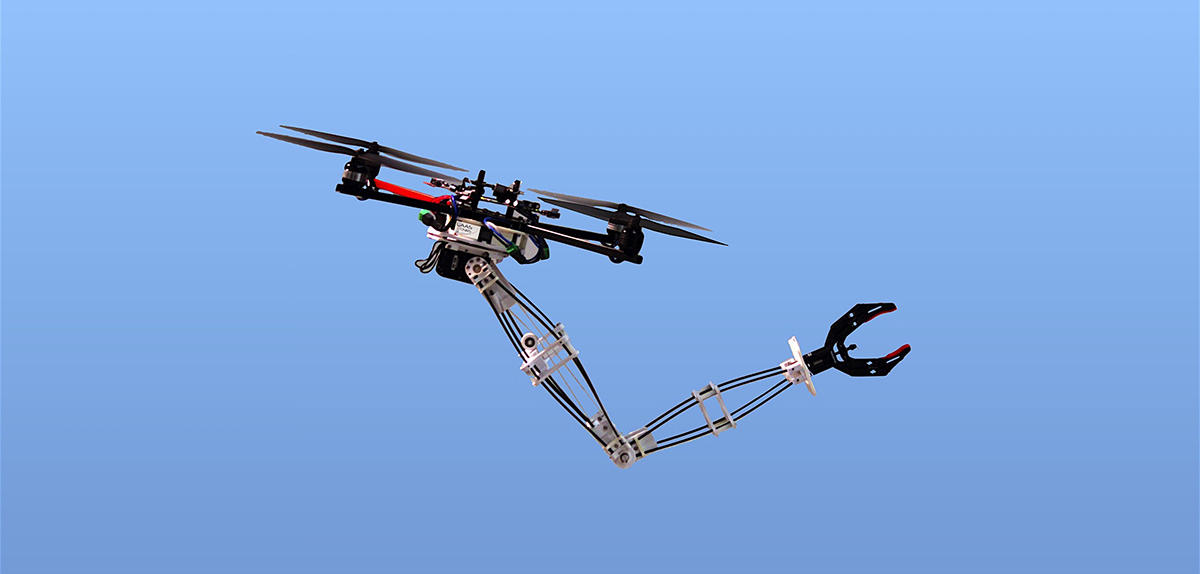
Le robot aérien développé par le LAAS-CNRS (source : CNRS)
La locomotion marine et sous-marine
Inspirés majoritairement des bateaux et sous-marins, généralement propulsés par des hélices. Les robots utilisant ce type de locomotion sont principalement utilisés dans les domaines suivants :
- océanologie, hydrologie, archéologie,
- pétrole et gaz offshore, télécommunications, éolien,
- environnement,
- compagnies maritimes et chantiers navals,
- aquaculture...
Mais de nouveaux projets inspirés de la biodiversité marine émergent. L'université de Caltech à Pasadena en Californie s'intéresse à l'exploration des océans et développe pour cela un robot inspiré des méduses.
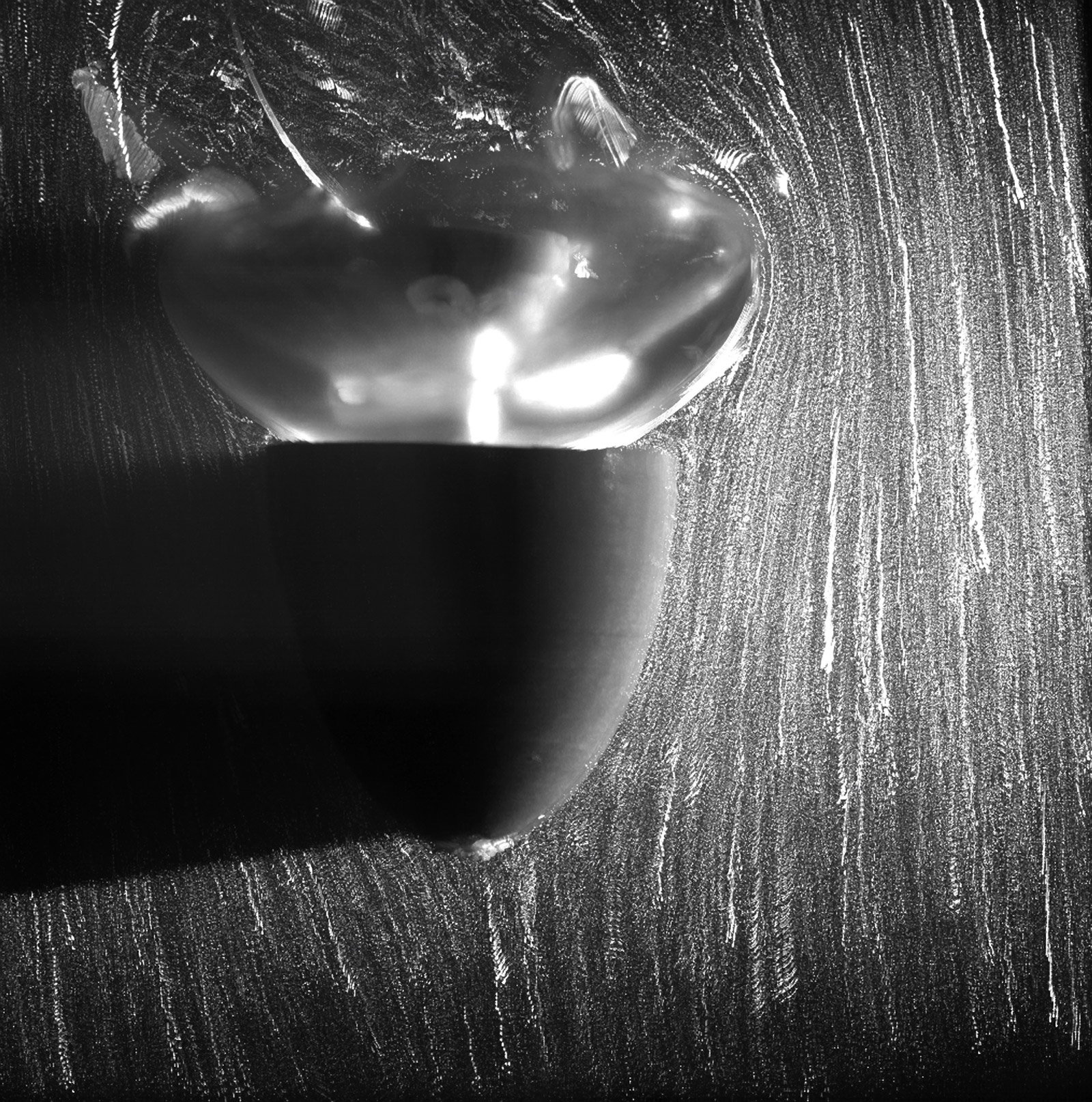

Le robot Jellyfish développé par Caltech (source : Caltech)
A gauche, avec capuchon - A droite, dans son état naturel sans capuchon
Plus récemment, la société chinoise Shenyang Aerospace Xinguang Group, basée à Shenyang a présenté un robot aux allures de requin-baleine. Il peut être utlisé pour surveiller de la qualité de l'eau, cartographier les fonds marins ou encore pour des missions spécialisées.
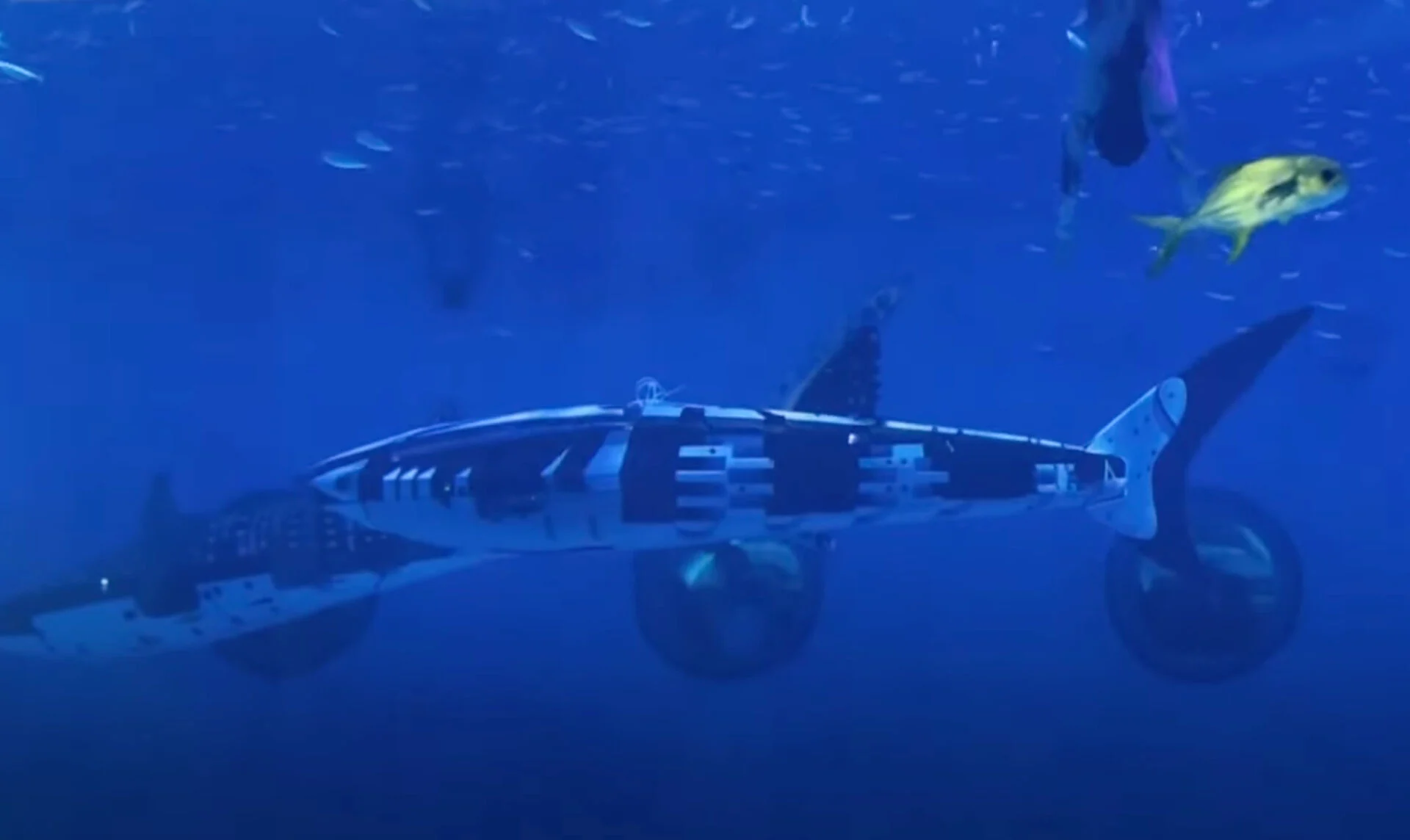
Le robot requin-baleine chinois (source : Le Journal du Geek)
Que ce soit le robot méduse de Caltech ou le robot requin-baleine chinois, le mode de locomotion ressemble à leur modèle vivant dont ils s'inspirent, et ne sont donc pas propulsés par des hélices, comme peuvent l'être les robots "bateaux" et "sous-marins".
Après ce tour, non exhaustif, des différents types de locomotion possibles pour un robot, nous verrons, dans le prochain chapitre, comment un robot peut "voir" son environnement.